Lecture 06
1.0 - Graph Data Structures
We may need certain information about graphs:
- Shortest path from vertex to vertex
- Shortest path from vertex to every other vertex (typically require this to solve previous)
- Does the graph contain cycles?
- Is it connected?
- Find a minimum spanning tree
- Shortest tour of all vertices? (shortest path through all vertices)
Graphs will be used to explore different programming styles throughout the course.
1.1 - Types of Graphs
- Directed Acyclic Graphs (DAGs)
- Connected Graphs
- Trees are special types of graphs
- Lists and vectors are also simple graphs.
1.2 - Graph Representations
- There are two main approaches to representing graphs:
- Adjacency Lists
- Adjacency Matrix
- (Representing the set of vertices and edges directly is too inefficient)
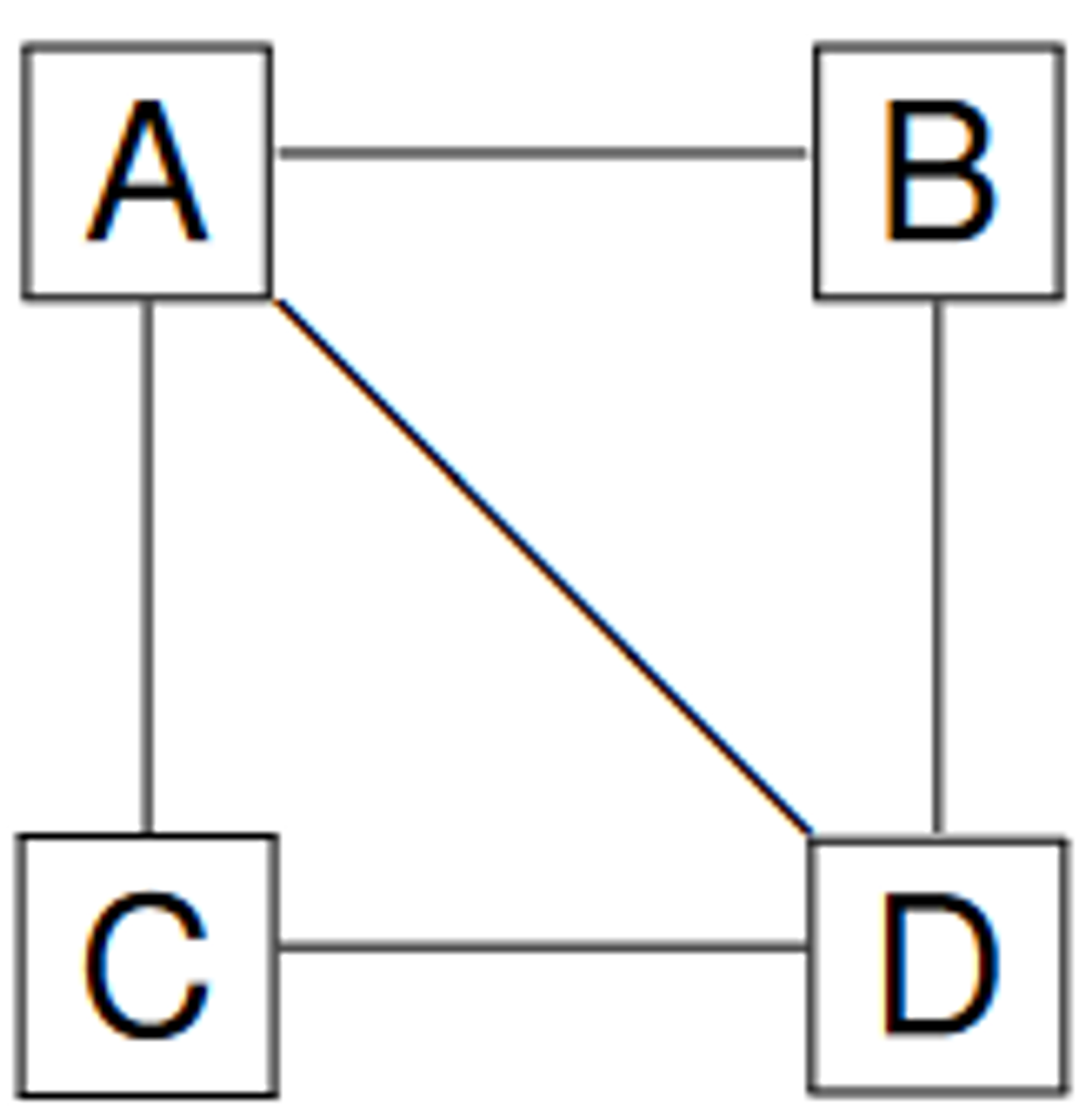
1.2.1 - Adjacency List (Undirected)
🌱 For every vertex, store a list of vertices that it’s adjacent to
| Node | Connections |
|---|---|
| A | B, C, D |
| B | A, D |
| C | A, D |
| D | A, B, C |
For an undirected graph with vertices and vertices, what is the worst-case:
-
Space Complexityis proportional to the number of vertices and edges - For every vertex, we store a list of the adjacent vertices of size . as in an undirected graph, we count every edge twice (as is in ’s adjacency list and vice versa). -
Time Complexityof isAdjacentTo(u, v) We find the adjacency list for (), and iterate through it to find (worst case ) -
Time Complexityto list all adjacent vertex pairs Have to iterate through every entry in each adjacency list - in worse case time in the case of a dense graph (with many edges). However, we know that all of the adjacency lists contain a maximum of entries.
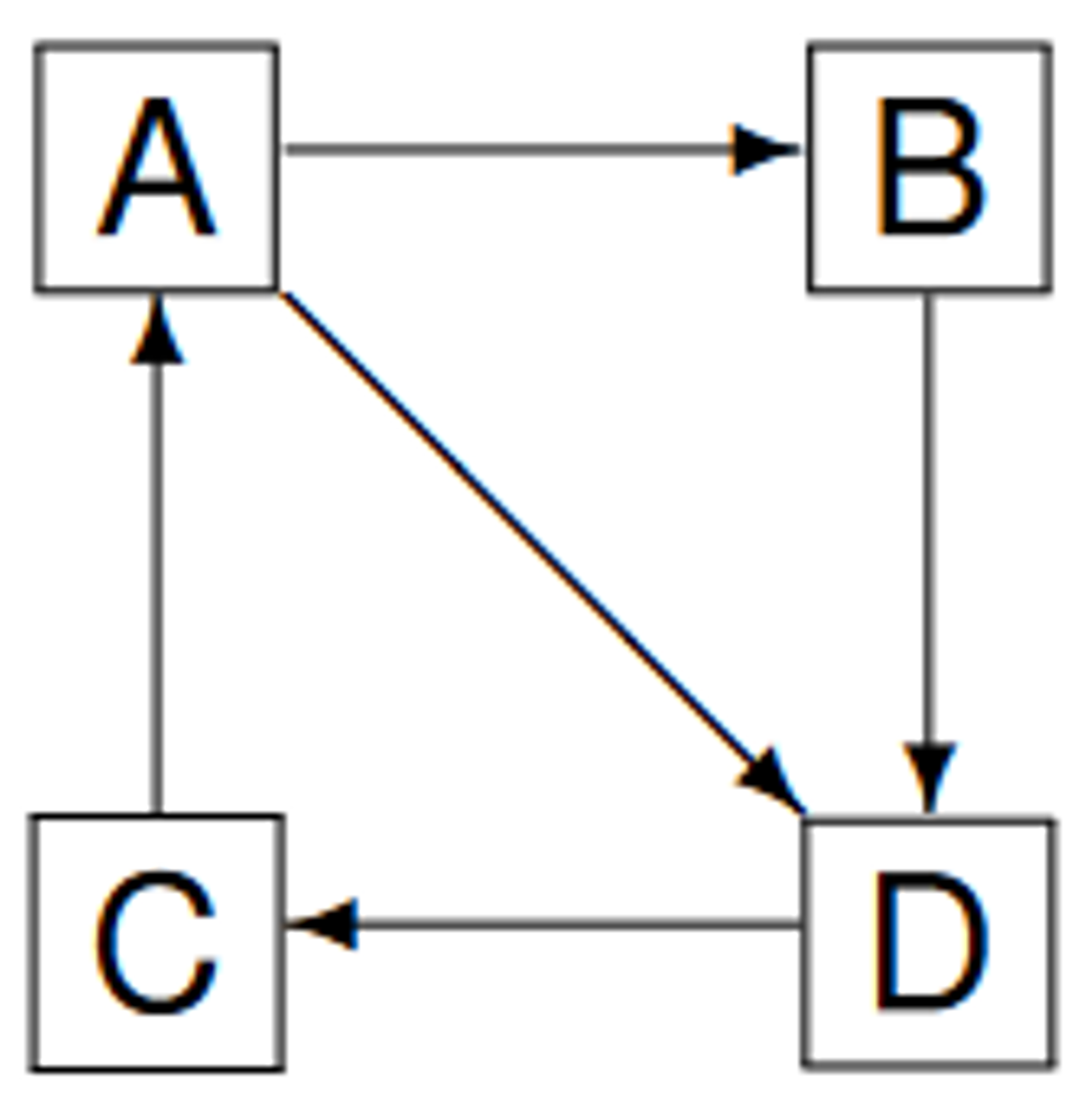
1.2.2 - Adjacency List (Directed)
| Node | Connections |
|---|---|
| A | B, D |
| B | D |
| C | A |
| D | C |
For a directed graph with vertices and vertices, what is the worst-case:
-
Space Complexityis proportional to the number of vertices and edges - Each adjacency list contains all of the destinations of each edge. -
Time Complexityof isAdjacentTo - same analysis as for an undirected graph - lookup of adjacency list, and worst case lookup -
Time Complexityto list all adjacent vertices
1.2.3 - Adjacency Matrix (Undirected)
| A | B | C | D | |
|---|---|---|---|---|
| A | ❌ | ✅ | ✅ | ✅ |
| B | ✅ | ❌ | ❌ | ✅ |
| C | ✅ | ❌ | ❌ | ✅ |
| D | ✅ | ✅ | ✅ | ❌ |
For an undirected graph with vertices and edges what is the worst case:
-
Space Complexityas we have to create a matrix -
Time Complexityof isAdjacentTo(u, v) as we just index into the matrix for both entries -
Time Complexityto list all adjacent vertex pairs as we have to iterate through every cell of the matrix. -
Observe that the adjacency matrix of an undirected graph is symmetric about the diagonal
1.2.4 - Adjacency Matrix (Directed)
| A | B | C | D | |
|---|---|---|---|---|
| A | ❌ | ✅ | ❌ | ✅ |
| B | ❌ | ❌ | ❌ | ✅ |
| C | ✅ | ❌ | ❌ | ❌ |
| D | ❌ | ❌ | ✅ | ❌ |
For a directed graph with vertices and edges, what is the worst-case
-
Space Complexityas we have to create a matrix -
Time Complexityof isAdjacentTo(u, v) as we just index into the matrix for both entries -
Time Complexityto list all adjacent vertex pairs as we have to iterate through every cell of the matrix.
1.3 - Comparison of Graph Representations
- The adjacency list representation is often the most efficient if the graph is sparse:
- Few edges relative to the number of vertices
- The adjacency matrix representation is often the most efficient if the graph is dense:
- Many edges relative to the number of vertices.
2.0 - Graph Traversal Algorithms
2.1 - Graphs and Shortest Path Algorithms
- For an unweighted graph
- The length of a path is the number of edges in that path.
- For example, the length of is 2
- The distance from vertex to is the length of the shortest path from to in .
2.2 - Breadth-First Search
- Takes as an input an unweighted graph and a designated start vertex
- Traverses vertices in in order of their distance from
- Finds the shortest paths from to every other vertex in
2.2.1 - Implementation of BFS
What do we know about BFS?
- Start vertex is at a distance from itself.
- The vertices adjacent to , other than those at distance are at distance 1
- The vertices adjacent to v’s adjacent vertices (other than those at distance 0 or 1
- etc…
We will use a queue data structure:
- Vertices are:
- Enqueued in order of their distance from the start vertex
- Dequeued in order of their distance from the start vertex
- The first element added to the queue is the start vertex
- When a vertex is dequeued, its adjacent vertices that have not yet been reached are enqueued
- Can be implemented either using a circular array (require amortisation to resize), or a linked list
How do we keep track of which vertices have been reached?
- Colours are used to distinguish vertices at different stages within an algorithm:
WhiteNot yet reached (never enqueued, a shortest path not yet found)GreyReached, but all adjacent vertices not reached yet (i.e. enqueued, but not dequeued; a shortest path found)BlackReached and completed (i.e. enqueued and dequeued; shortest path found)
🌱 To find the shortest path from A to B, we just need to keep track (update) of the parent of each node as we visit it
BFS(G, v)
for u in G.V - {v} # For all but the starting vertex.
u.distance = ∞;
u.colour = white;
u.parent = NULL;
v.distance = 0;
v.color = grey;
v.parent = NULL
Q.initialise()
Q.enqueue(v)
while !Q.isEmpty()
current = Q.dequeue()
for u in G.adjacent[current]
if u.colour == white # For vertices with no shortest path yet, compute.
u.distance == current.distance + 1
u.color = grey;
u.parent = current
Q.enqueue(u)
current.color := black
2.2.2 - Performance of BFS
The worst-case time complexity of BFS is:
The worst-case space complexity of BFS is (for space to store colours, and the queue).
Assuming enqueue and dequeue take time, and we use an adjacency list representation of our graph problem - require determining adjacent vertices in time.
That is:
for initial colouring
for setup of initial vertex v, initialisation of queue and enqueueing v.
as:
Each vertex can be added to the queue at most one time; Therefore, the while loop iterates at most times.
We perform the inner loop times, in which we do a constant amount of work per iteration of the inner loop.
Since
2.3 - Depth-First Search
- Doesn’t necessarily find the shortest paths
- Often used as a sub-routine within other algorithms
- Typically use DFS to learn more about the structure of a graph
- A recursive algorithm that visits a vertex by:
- Choosing an unvisited vertex adjacent to v
- visiting and so on
- Before backtracking to , and continuing until has no more unvisited adjacent vertices.
2.3.1 - Implementation of DFS
- We store additional information about the graph by storing a node’s parent so that we can re-create the traversal path taken
- A depth-first search on an undirected graph produces a classification of the edges of the graph into tree edges, or back-edges
- For a directed graph, there are further possibilities.
The depth-first search algorithm can be used to classify the edges in a graph (directed) into four types: (in an undirected graph, we only have tree edges and back edges)
Tree EdgesIf the procedure DFS(u) calls DFS(v) then (u, v) is a tree edge.Back EdgesIf the procedure DFS(u) explores the edge (u, v), but finds that v is an already-visited ancestor of u, then (u, v) is a back edge.- If a graph has a back edge, then it is cyclic.
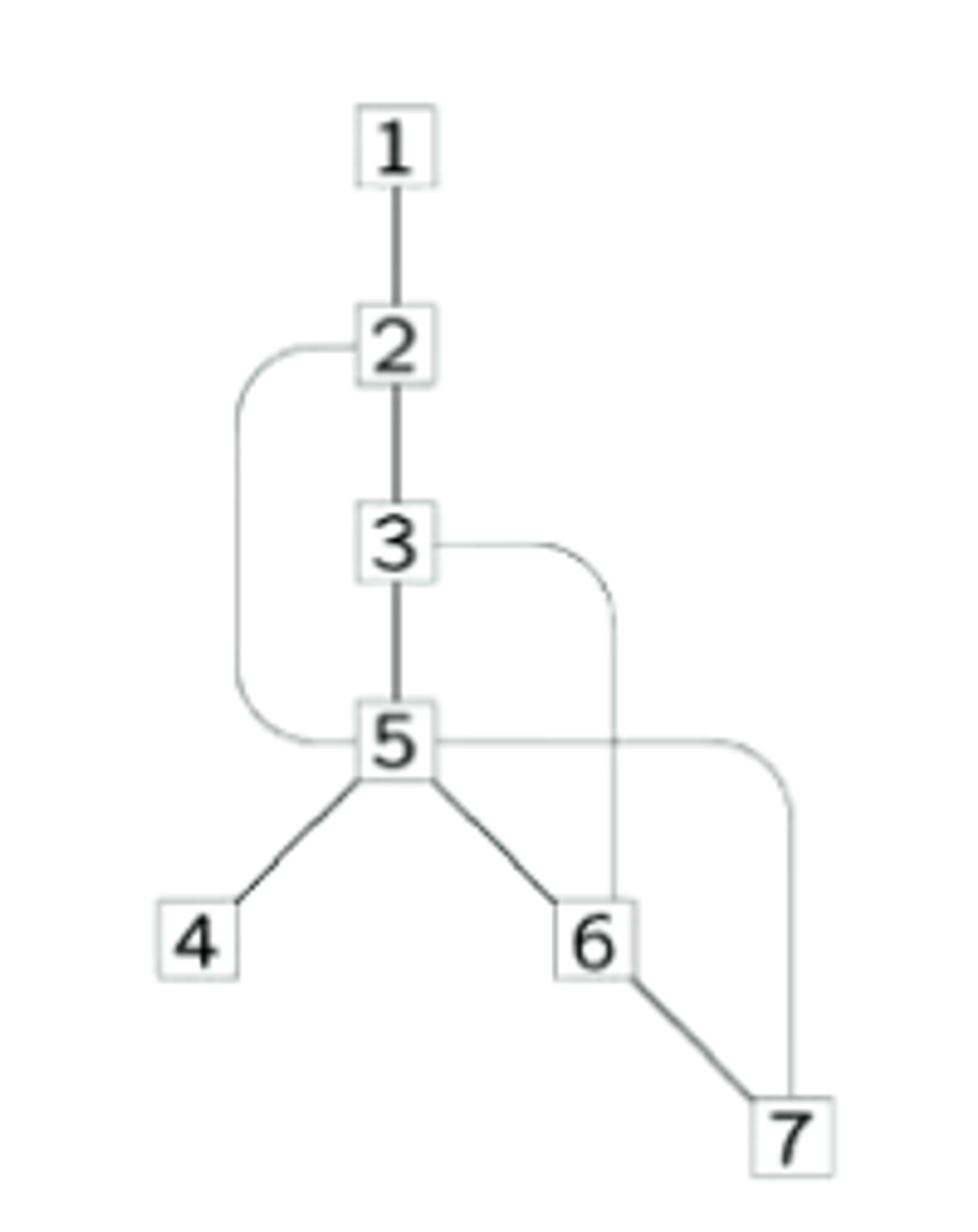
DFS Graph with back-edges (thinner lines)
Forward EdgesIf the procedure DFS(u) explores the edge (u, v) but finds that v is an already visited descendant of u, then (u, v) is a forward edgeCross EdgesAll other edges are cross-edges.
DFS(G):
# We use colour to indicate where in the traversal process we are
for u in G.V
u.color = white
u.parent = NULL
# For each vertex, we call dfs_visit on it
for u in G.V
if u.color == white then DFS_Visit(G, u)
DFS_Visit(G, v)
v.color = grey # Started traversal, but not finished
for u in adjacent[v]
if u.color == white:
u.parent = v
DFS_Visit(G, u)
v.color = black # Finished traversal for v
2.3.2 - Performance of DFS
for initial colouring
Each vertex can only be visited once, as we only visit it when it is coloured white.
work for the for loop in DFS(G), calling DFS_Visit for each vertex.
work for setting colours to grey and black at the start and end of the method
work for the for loop - a vertex has adjacent vertices.
Therefore, the work done (time complexity) by DFS is given as:
We use space to store the colours of each node, and space for recursive calls
- space for stack frame of recursive calls. In the worst case, the depth of the graph is .
2.3.3 - DFS with Start and Finish Times
DFS(G):
time = 0
# We use colour to indicate where in the traversal process we are
for u in G.V
u.color = white
u.parent = NULL
# For each vertex, we call dfs_visit on it
for u in G.V
if u.color == white then DFS_Visit(G, u)
DFS_Visit(G, v)
time += 1
u.discovered = time
v.color = grey # Started traversal, but not finished
for u in adjacent[v]
if u.color == white:
u.parent = v
DFS_Visit(G, u)
v.color = black # Finished traversal for v
time += 1
u.finished = time
3.0 - Directed Acyclic Graphs
-
A directed acyclic graph (DAG) is a directed graph with no cycles
-
The vertices in a DAG can be thought of as tasks
-
The directed edges in a DAG can be thought of as dependencies between vertices (tasks)
-
A topological sort of a directed acyclic graph is a linear ordering of , such that:
- if , then comes before in the topological ordering
-
Given a directed acyclic graph, as shown below, we can generate a topological ordering of the graph.
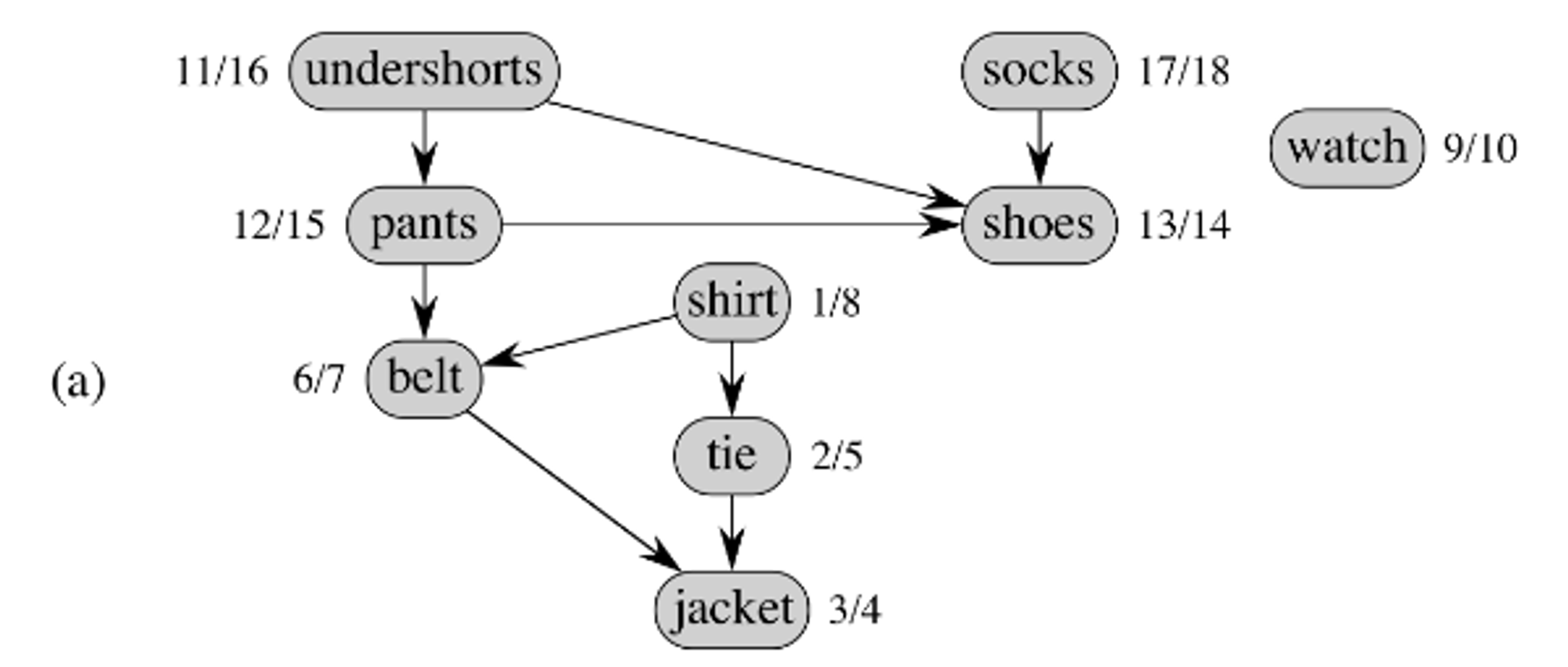
- The following is a topological ordering of the above image

3.1 - Topological Sort
- Performing a depth-first search on the graph will give a topological ordering.
- The starting and finishing times are listed on the side of each node
{startTime}/{finishTime}
- The starting and finishing times are listed on the side of each node
Topological_Sort(G):
initialise an empty linked-list of vertices
call DFS(G)
as each vertex is finished in DFS, insert it onto the front of the linked list
return the list of vertices.