1.0 - Amortised Analysis
-
So far, we have analysed algorithms for “one-off” use.
-
However, we often used a data structure (object) for a purpose that involves many uses of its methods
- For example, the multiple calls to extract-min from a priority queue.
Dijkstra(G, w, s) // (G) Graph, (w) weight function, (s) source vertex init_single_source(G, s) S = ∅ // S is the set of visited vertices Q = G.V // Q is a priority queue, maintaining G.V - S while Q != ∅ u = extract_min(Q) S = S ∪ {u} for each vertex in G.adj[u] relax(u, v, w) -
We want to determine the worst-case time complexity of a series of operations, rather than just a single operation in isolation
-
Consider an object x with multiple operations
- The “worse” is worst-case
- You design an algorithm that uses object x’s method times
- Naively, the worst-case time complexity is
-
However, you may know that the worst-case cannot happen times in a row - in this case, how can you prove that the implementation is actually better then
-
Amortised analysis considered sequences of operations, typically that successfully modify a data structure
1.1 - Dynamic Table Example
Store an initially unknown number of elements in an array.
- Double the size of the array when it runs out of space
Typically, inserting an element into an array is constant time
- However, sometimes one must:
- Allocate a new, larger array (of twice the size)
- Copy all of the elements to the new array, and add the new element.
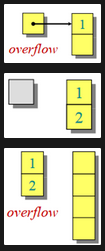
Suppose our array initially has size 1.
-
Inserting the first element into the array succeeds.
-
Inserting the second element into the array fails, so we must construct a new array, copy over the old elements + new element.
-
Following this, the insertion of the third element once again causes the array to over flow, and thus we must construct a new array, copying over the new elements.
-
After operations (of inserting a new elements) there are elements in the array
-
Inserting an element when the capacity is full (worst case for some ) is
-
Thus, inserting elements is ?
- No, it is still
-
We are analysing:
for 1 = 1..n insert(e_i) -
for some sequence of elements
-
The vast majority of insertions are constant time
-
How many are not, and what their cost are depend on
1.1.1 - Tighter Analysis on Dynamic Table
Let
From this, we get:
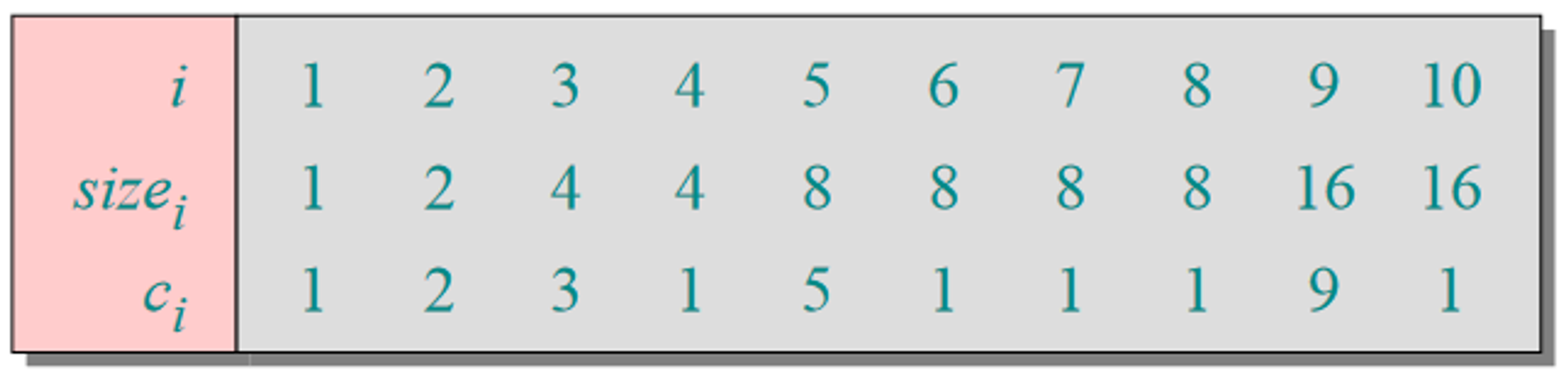
- Inserting the 1st, 4th, 6th, 7th, 8th, 10th element takes constant time as we have space
- Inserting the 2nd element has a relative cost of 2:
- Copy across existing element
- Copy across new element
- Inserting the 3rd element has a relative cost of 3:
- Copy across existing 2 elements
- Copy across new elements
1.1.2 - Dynamic Table: Aggregate Method
🌱 Develop a summation, and solve it for operations. Develop bound for that series of operations.
-
Inserting the 2nd, 3rd, 5th, 9th, … elements (when the array has size 1, 2, 4, 8, …) has an additional cost equal to the size of the array
-
In general, how many resizes are there in a sequence of insert operations, for ?
-
How much does the resize operation cost?
-
The cost of insertions is:
insertion operations, cost from resize operations, each costing
-
Thus, the average cost of each dynamic table operation is
1.2 - Stack Operations
-
Consider standard stack operations push and pop, and
multipop(S, k) // Assumes that S is not empty, and k > 0 while S is not empty and k > 0 pop(S) k = k - 1 -
Multipop(S, k) can be (where is the size of the stack) if
-
Hence, any sequence of stack operations must be
-
But can we prove a better bound?
-
Yes, here’s our intuition
-
Multipop will only iterate while the stack is not empty
-
Each element is pushed exactly once, and popped exactly once, hence after pushes, there can be at most pops.
1.2.1 - Aggregate Method
-
We want to determine the time complexity of stack operations, starting from an empty stack:
for i = 1..n Push(...) or Pop(...) or Multipop(...) -
Arguing that these operations are is clumsy using the aggregate method.
-
Consider the more sophisticated techniques:
- Accounting method - focus on the operations
- Potential method - Focus on the data structure
1.2.2 - Accounting Method
-
Begin the accounting method by calculating the actual cost of each operation
- Push: 1
- Pop: 1
- Multipop(S, k):
-
Assign an amortised cost to each method
- Push: 2
- Pop: 0
- Multipop(S, k): 0
-
For any sequence of stack operations, the amortised cost must be an upper bound on the actual cost
-
Then, one can use the amortised cost in place of the (more complicated) actual cost
-
In the above case, ever operation has a constant amortised cost, and hence a sequence of operations is
-
We must show that the total amortised cost minus the total actual cost is never negative
For all sequences of all possible lengths
Actual Cost Amortised Cost Push Pop Multipop(S, k) $k=\min(k, S -
Our intuition here is that the extra credit in the push operation pays for the later pop operations
- Have to PUSH an element for it to be Popped off later - so we encode this extra credit as part of the PUSH operation to be used later.
1.2.3 - Potential Method
-
Focus on the data structure, instead of the operations performed on the data structure.
-
Begin by determining the cost of each opeartion
-
Define a potential function, on the data structure
-
The amortised cost, of an operation is the actual cost plus the change in potential
-
For these amortised costs to be valid, we require that the amortised cost is an upper bound on the actual cost
- We can simplify this expression using the telescoping series.
-
Following on from this, the obligation is to show that after every operation (and thus )
- Consider applying the Potential method to the stack from before.
- Push and Pop both cost 1 operation
- Multipop costs
- let be the size of the stack
- Our change in potential, is modified by the size of the stack:
- Push: 1 (the size of the stack has increased by 1)
- Pop: -1 (The size of the stack has decreased by 1)
- Multipop: -k’ (The size of the stack has decreased by -k’)
- From this, our amortised cost is:
- Push: 2 (1 + 1)
- Pop: 0 (1 - 1)
- Multipop 0 (k’ - k’)
- Our obligation is to show which is trivial (as the potential function gives the size of the data structure)
- Therefore, all operations have constant amortised time