1.0 - Complexity Class P
-
Set of concrete decision problems that are polynomial-time solvable.
-
Decision problems have a simple yes or no, answer
-
A concrete problem is a problem whose instance set is the set of binary strings
-
A concrete problem is polynomial-time solvable if there exists and algorithm to solve it in time for some constant , where is the length of the binary input string
-
How do we know if a concrete decision problem is in ?
-
To show that a problem A is in P we could:
- Come up with a polynomial-time algorithm to solve A
- OR if we already know that another problem B is in P:
- Find a polynomial-time reduction algorithm to transform an instance of decision problem A instance to an instance of a decision problem B.
- Using this, we can convert the problem instance
- We can then run algorithm B on the converted problem instance
1.1 - Polynomial-Time Reduction Algorithm
Problem A is polynomial-time reducible to B if there exists a polynomial-time reduction algorithm to transform every instance of into an instance of
-
A polynomial time reduction algorithm
- Transforms an instance of a decision problem into an instance of a decision problem
- The transformation algorithm is polynomial time.
- The answers are the same - if then
- That is if is converted to , then
-
Assuming reduce-A-to-B is a polynomial-time algorithm to reduce an instance of A to an instance of B
-
We can solve problem A in terms of B
-
If is polynomial time, and is polynomial time, then is polynomial time
-
Thus we have the conclusion that if B is “easy”, then so is A.
2.0 - Complexity Class NP
- The complexity class NP is the set of concrete decision problems for which a solution (a certificate) can be checked (verified) in polynomial time
- Nondeterministic Polynomial: If you could simultaneously check all solutions to a given input, then the problem would be polynomial-time solvable
- That is, you could non-deterministically pick the right solution and check it in polynomial time
- Problems for which we can’t even verify a solution in polynomial time are unlikely to have a polynomial time (efficient) algorithm to generate solutions
2.1 - P=NP
- Trivially, P is a subset of NP
- Are there some problems where a solution is quick to verify, but which can’t be implemented efficiently? This is unknown
- But most (everyone?) this there are, we just haven’t worked out how to prove it yet.
- This is the famous “P=NP” problem
2.2 - Example of an NP Problem - TSP
- The Travelling Salesman Problem (TSP) is to find the shortest path that visits every vertex exactly once in a graph, and returns to where it starts (assuming positive weights)
- For the sake of reasoning, we deal with a decision problem - is there a tour of length at most ?
- A solution is a list of vertices in the order visited.
check-tsp(G, S, k)
1. Check that every vertex is in S exactly once.
2. Check that every pair of adjacent vertices is in S is conncted by an edge in G
3. Check that there is an edge from the last vertex to the first
4. Sum weights of all such edges, and call the total t
5. return t <= k
- is trivial to see - the above checking algorithm is in polynomial time
- We would like for it to be in - for there to be a polynomial-time algorithm that generates solutions to
- Frustratingly, we just don’t know (yet) whether it is in or not
- This is despite
- TSP being of practical (commercial) importance, and
- Decades of research into efficient solutions to TSP specifically and computational complexity generally.
2.3 - Progress with P=NP (NP-Hard)
- Some progress has been made
- A concrete decision problem is when every problem is polynomial-time reducible to
- Thus, if any one of these problems can be solved by a polynomial-time algorithm then all problems in NP can be solved by a polynomial-time algorithm
2.4 - NP-Complete
- A concrete decision problem is if and only if
- It is NP-hard and - every problem is polynomially reducible to B
- It is in NP - solution can be verified in polynomial time
- And so, these are the hardest problems in the NP class.
- Are there any NP-complete problems? Yes!
- It turns out TSP is in NPC
- Thus, if you can find a way to solve TSP efficiently, you can solve a large class of important problems efficiently, and at the same time prove
- In other words, you are unlikely to find an efficient solution to TSP
- That the set NPS is non-empty is a helpful clue to
- It seems unlikely that all problems in NP are polynomial time solvable, so “probably” the NPC problems are not polynomial-time solvable
- If you can prove that the problem you are trying to solve is NP-complete, you know that it is unlikely that it is polynomial-time solvable.
2.5 - NP Recap
- NP is the set of problems for which it is not unreasonable to think that there may be efficient solving algorithms
- We have identified a useful subset, P, for which efficient algorithms exist
- Many (theoretically and practically) important algorithms are in NP, but we don’t know whether or not they are in P
- Interestingly, we have found the subset NP-Complete, which are the “Hardest” of any in NP
- We are working towards learning a technique for showing that a problem is NP complete, then it is reasonable to stop trying to find an efficient algorithm
2.5.1 - NP-Complete and Cook’s Theorem
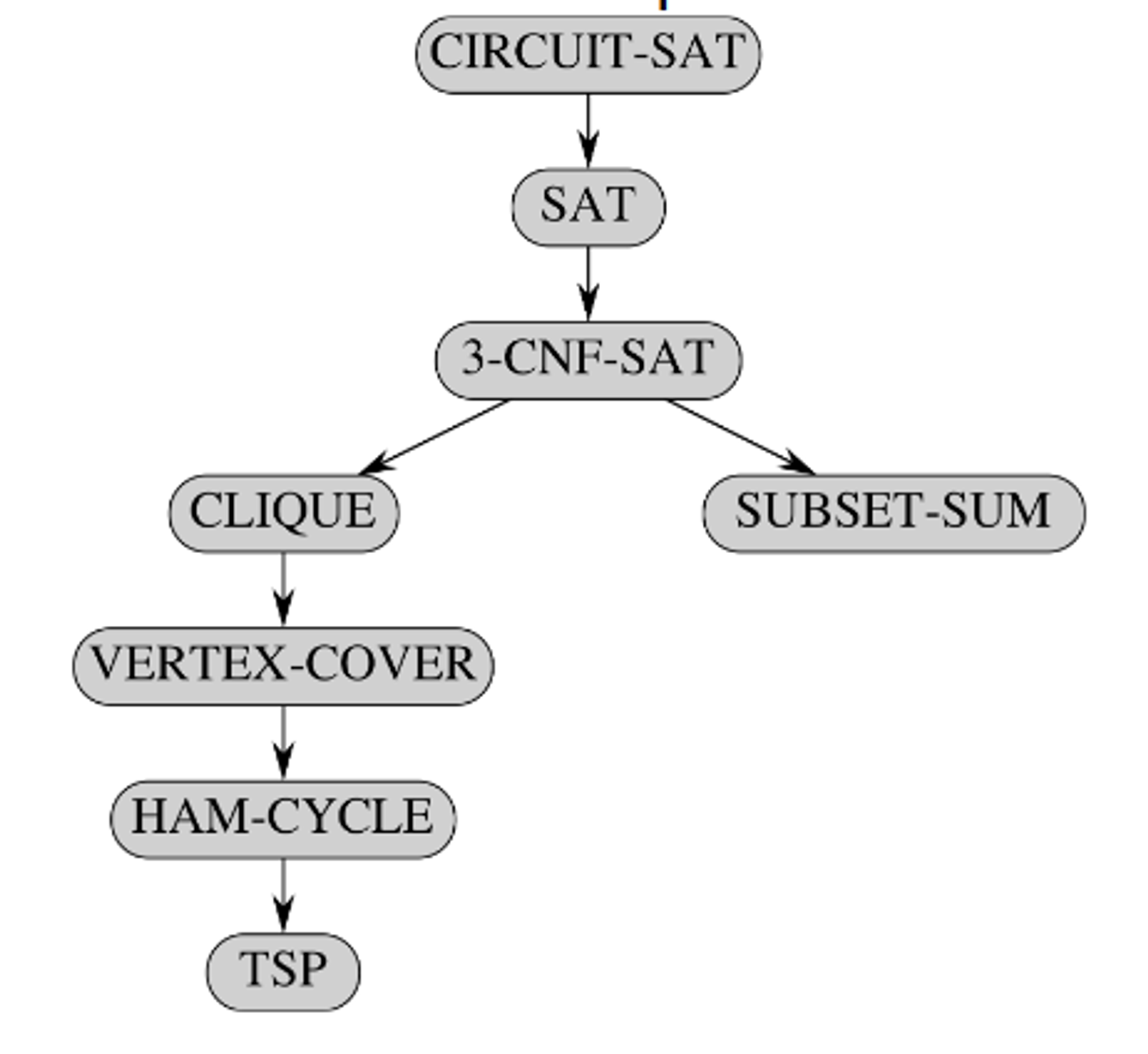
- The CIRCUIT-SAT problem is NP Complete
- This is the “first” NP complete problem
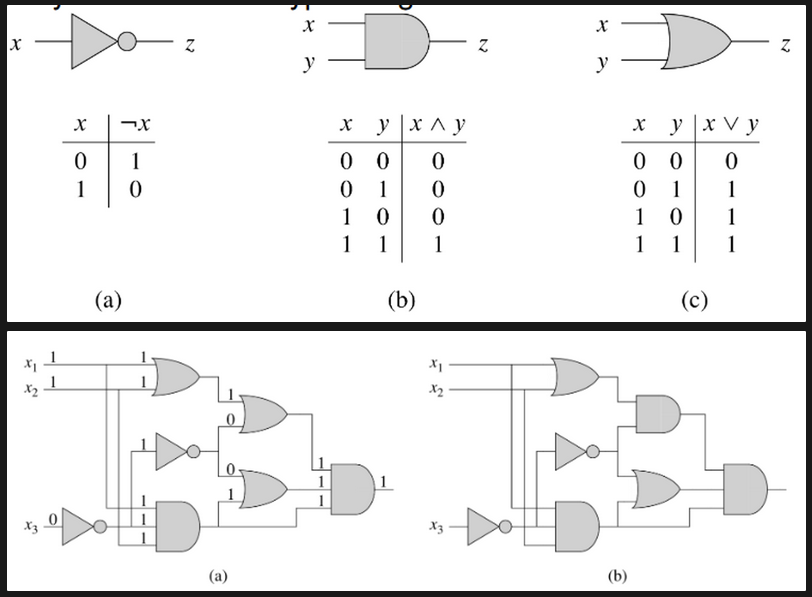
- A circuit refers to a type of logical circuit, comprised of AND and OR gates, etc.
- Cook showed that any problem in NP can be reduced in polynomial time to a circuit, that is, restated as a problem using a circuit
- Thus, if you can solve CIRCUIT-SAT in polynomial time, and your problem can be reduced to a circuit in polynomial time (any problem in NP can), then you can solve your problem in polynomial time.
2.4.2 - CircuitSAT (Circuit Satisfiability)
-
A circuit is a basic concept from computer science; perform logical operations on binary inputs
-
Usually consider three types of gates (NOT, AND, OR)
-
We can compose these elements into a full circuit with no cycles and one output
-
CIRCUIT-SAT asks for an assignment of 1 or 0 to each of the variables that produces as the output
-
Figure has no such assignment.
-
Proof that CircuitSAT is NP Hard
- All inputs may be encoded in binary format in polynomial time, and all problems can be stated as circuits
- Thus, if CircuitSAT can be solved in polynomial time as well, other NP problems can be solved as well.
-
How does Cook’s theorem help?
-
Run this algorithm for solving problem with input
Solve-L(i) Transform (reduce) the input i to i' for CIRCUIT-SAT return CIRCUIT-SAT(i')
- Step 1 is polynomial time and applies to all problems in NP (from Cook’s theorem)
- Hence if Step 2 is also polynomial time, all problems in NP can be solved in polynomial time (Including those in NP-Complete)
2.6 - Reductions
💡 Using Cook’s Theorem as an intermediate to find a reduction from any NP problem to your problem - we already have a reduction from all problems to CircuitSAT, so just need to find a reduction from circuit sat to our problem.
-
Let X be your own problem
-
If you can show that CIRCUIT-SAT is polynomial-time reducible X, then X is NP-hard
-
Why?
-
If CIRCUIT-SAT reduces to X, and if you have a polynomial time solution to X, then you can solve CIRCUIT_SAT in polynomial time, and hence can then solve all NP problems in polynomial time
-
That is, implement the solution to CIRCUIT-SAT as:
CIRCUIT_SAT(i) Transform (reduce) the input i to i' for X return X(i') -
If you can show that CIRCUIT_SAT is polynomial-time reducible X, then X is NP-Hard
-
To show that X is NP-complete, you have to show that X is in NP
- We can show this that a solution/certificate can be verified/checked in polynomial time
-
In practice, reducing CIRCUIT_SAT directly to X may be tedious.
-
Instead we choose a known NP Hard problem that is closer to X
-
The operator is read as “reduces to”
-
This is possible as polynomial-time reductions are transitive.
2.7 - Travelling Salesman Problem - NP Completeness
- In a weighted graph, find the least-cost path that visits every vertex once, returning to the start
- Recall the verification algorithm TSP-Check(G, S, k)
- To show that the TSP problem is in NP-Complete we need:
- is in NP-Hard - to do this we need to reduce another NP-hard problem to TSP.
- We will reduce the Hamiltonian cycle problem to the NP Hard problem
2.7.1 - TSP - Reduction from Hamiltonian Cycle to TSP
As mentioned above, we perform this step to prove that the TSP problem is NP Hard.
-
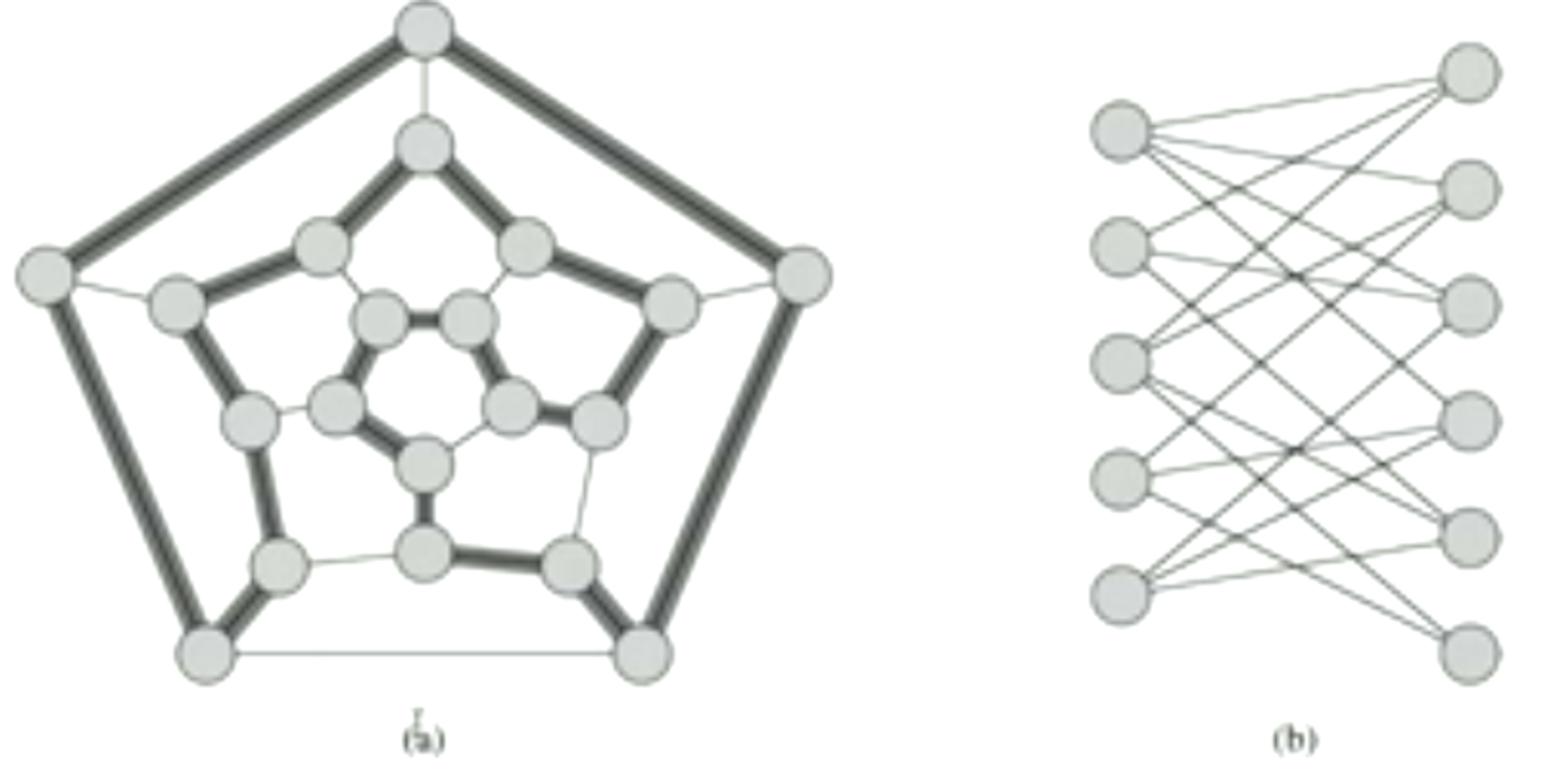
A Hamiltonian cycle is a simple path through an unweighted graph that contains every vertex, starting and ending at the same vertex
-
A graph is Hamiltonian if it contains a Hamiltonian cycle - this is a decision problem
-
Graph A is Hamiltonian, Graph B is not.
Recall
- Assume that we can solve TSP in polynomial time
- Then how can we use that (non-existent?) algorithm to solve HAM-CYCLE?
- We need to find a reduction from HAM-CYCLE to TSP (that is, find a way to convert the inputs from HAM-CYCLE to the inputs to TSP)
- The trick is setting the weights in the TSP version:
- If an edge exists, give it a weight of 0
- If not, give it a weight of 1
- Use the TSP algorithm to find a tour with weight 0.
3.0 - Recap
-
P: Polynomial time to solve
-
NPC: Probably worse than polynomial-time to solve
-
NP Problems that may feasibly be polynomial time (we can check a solution in polynomial time)
-
Important first problem: CIRCUIT-SAT (recall Cook’s Theorem)
-
This forms the basis of a chain of reductions, hence the set NPC is non-empty, non-singleton
-
Using reduction we can show a new problem is also NPC
-
Hence that problem is unlikely to have an efficient algorithm to solve it.
3.1 - Approximation Algorithms
- Many real problems have efficient algorithms that give a good approximation
- For TSP, this is enough in practice (reduce cost, not necessarily minimise cost)
💡 This algorithm, at worst is twice the cost of the optimal solution
approx-tsp-tour(G, c)
1. select a vertex r in G.V to be a root vertex
2. Compute a minimum spanning tree T for G from root r using MST-Prim(G, c, r)
3. Let L be the list of vertices visited in preorder tree walk of T
4. Return the Hamiltonian cycle H that visits the vertices in order of L
-
This graph returns a tour of no more than twice the cost of an optimal tour assuming that the graph satisfies the triangle inequality:
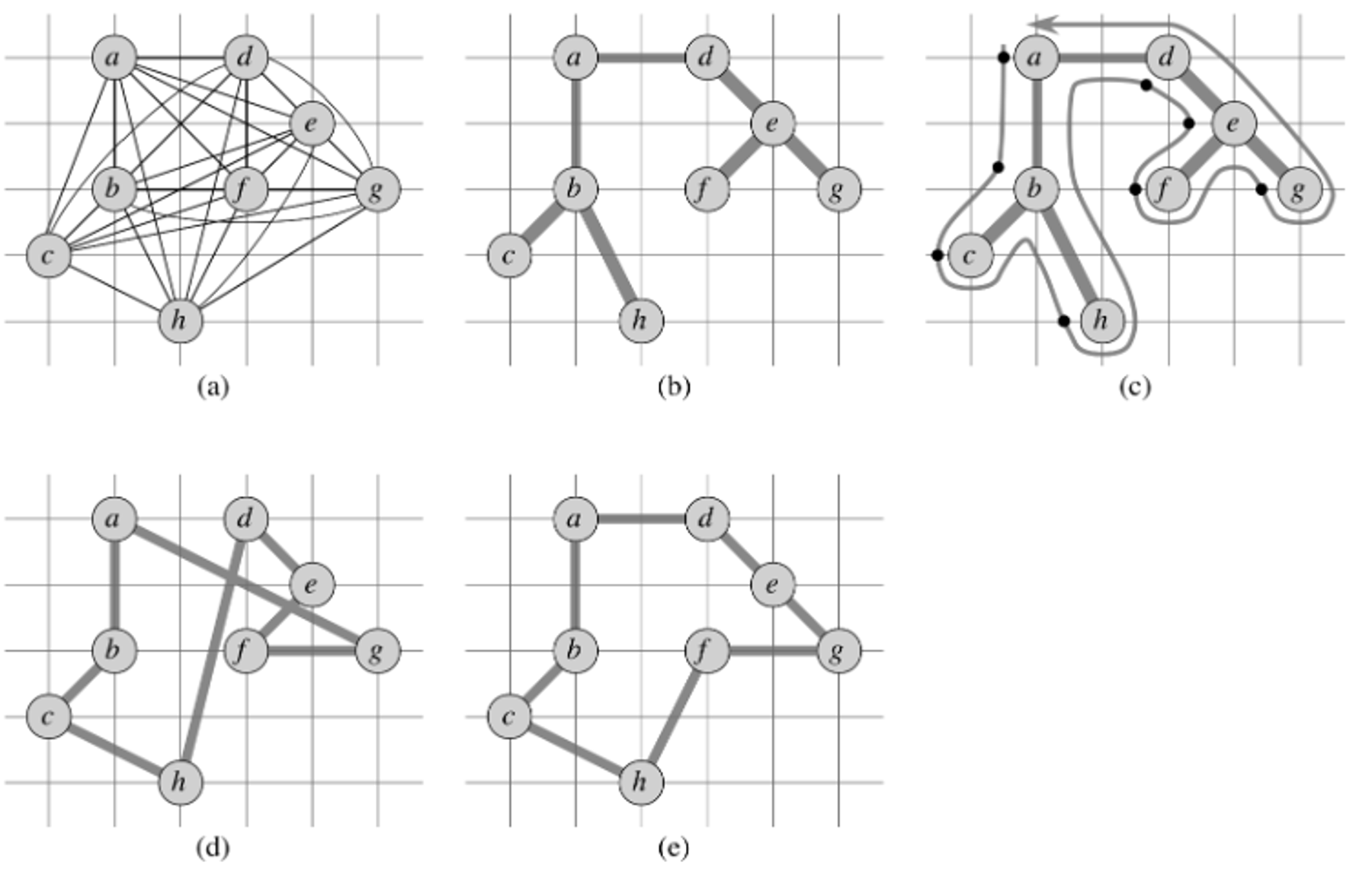
(b) is the minimum spanning tree for the graph - upper bound on the cost of the tour
(c) pre-order traversal of MST
Tour (d) is that returned by approximate-tsp-tour with cost of 19.074 - this is the tour generated by a pre-order traversal of the MST
- We avoid repeating vertices
- However, considering visiting every vertex in order via the MST traversal, we at most visit each vertex twice
- This is how we get the bound that this MST traversal is at worst twice that of the optimal solution
Tour (e) is an optimal tour, with cost 14.715
- Because of the triangle inequality, we know that the cost of going from c → h is no worse than going from c → b → h