Lecture 1
Lecture 1
Nothing important, just admin stuff
Lecture 2
k-Nearest Neighbours
- Prediction determined by looking at labels or true values of nearest points in training set.
- Implies some sort of distance metric
- Regression: Use average of nearest points
- Classification: Use majority vote of nearest points
- Choice of should be such that the model neither overfits nor underfits.
Decision Trees
- A model that divides the feature space into axis-aligned regions.
- Learning all possible spaces is intractible, so a greedy algorithm is used
- Regression: Use average of points in region
- Commonly use Sum of Squared Error as a metric for splitting
- Classification: Use majority vote of points in region
- Use misclassification rate, Gini index or entropy criterion as a metric for splitting
Lecture 3
Linear Regression
- Training is easy as there eists a closed-form solution
- Use loss function as a metric to measure the similarity between prediction and truth
- Commonly use Squared Error Loss
Maximum Likelihood Perspective
- Wanting to maximise the probability that our prediction is the observed value (Maximum Likelihood Perspective) turns out to be equivalent to using Squared Error Loss.
- Arrive at the same equation.
Logistic Regression
- Similar to Linear Regression, but with a sigmoid function applied to the output to bound the output between 0 and 1.
- No closed-form solution exists (numerical optimisation required)
- For binary classification, we train a model to predict , and then .
- For multi-class problem, we train linear regression models to predict for using one-hot encoding.
- Softmax is used such that the sum of all probabilities is 1.
- Each output is then the probability that the input belongs to the corresponding class.
Lecture 4
Error Functions
- An error function compares the predicted value with the true value
- If an error function returns a smaller value, the prediction is better.
- SSE and Misclassification Rate are examples of Error functions
- Error functions can be the same as the oss function, but isn’t necessarily the same.
- Loss Function is used for training the model
- Error function is used to evaluate a trained model
Estimating Enew
- Want to create models that minimise the error over new data
- Use to compare different models, and perform hyperparameter tuning
- Estimation via Validation Set
- Can set aside a portion of the training data as a validation set
- As the size of the validation set increases, becomes sa lower-variance estimate of but this leaves less training data.
- k-Fold Cross Validation
- Done by partitioning the dataset into equally sized subsets, training on subsets and testing on the remaining subset.
- is then the average of the errors.
- This leads to a lower-variance estimate of but is more computationally expensive.
Training Error vs Generalisation Gap
- A sweet spot between underfitting and overfitting exists, an equilibrium between model complexity.
- A model with low complexity will have both high E_new and E_train
- A model with high complexity will have high E_new and low E_train
- A model with optimal complexity will have minimal E_new.
Bias-Variance Decomposition of Enew
- can be decomposed into three components:
- Bias: The difference between the expected prediction and the true value
- Variance: The variance of the prediction
- As the amount of training data increases, the bias and variance decrease
- Typically can make the model more accurate by increasing the amount of training data
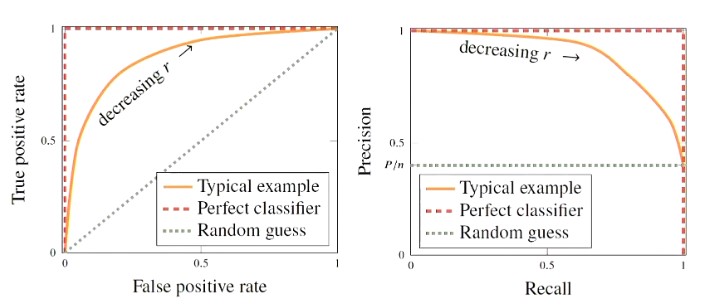
ROC and Precsion-Recall Curves
Two types of curves that can be used to evaluate the performance of a binary classifier and its different cut-off values
Lecture 5
Parametric Modelling
- Want to create and train non-linear models using various loss functions.
Loss Functions
- Regression typically use Squared Error , but can also use Absolute Error .
- Absolute error is more robust to outliers and can help with model complexity
- Classification - misclassification loss is intuitive
- Results in a loss function that is piecewise constant - difficult to optimise as it is piecewise constant
- Can use cross-entropy loss.
Regularisation
- A strategy for controlling modeling complexity
- Can be either implicit or explicit
- Explicit regularisation works by adding a penalty term to the cost function
- regularisation is the most common
- regularisation is also used, but results in a sparse model (where many parameters are 0)
- Implicit regularistaion works by controlling modelling complexity in another way
- Examples include early stopping, drop-out, data augmentation.
Parameter Optimisation
- The goal of training models is to find that allows the objective function to be minimised
- Gradient descent is one of the oldest optimisation techniques
- Used where we have functions that we can calculate the gradient of
- Need to find a learning rate that is suitable - not so low that the model takes a long time to learn, and high that the model cannot approach the minima
- Stochastic gradient descent is a variant of gradient descent that uses a random subset of the training data to calculate the gradient
- Optimal when optimising a large dataset - the subset is a good enough approximation and leads to greater computational efficiency.
Lecture 6
N/A
Lecture 7
Neural Networks
- Artificial Neuron is a unit that takes in several inputs via weighted connections
- The output from the neuron is the sum of these weighted inputs (+ bias)
- Each neuron effectively performs linear regression
- A single layer of units can be trained to perform multiple linear regression (linear regression with multiple outputs)
- A single layer of units with sigmoid activation function is very similar to multi-class regression
- (To be identicdal, use Softmax instead of sigmoid)
- Each layer of the neuron network is parameterised by a weight matrix and a bias vector
Training a Neural Network
- Collect all weights and biases and arrange them into a vector to use the same notation as throughout the textbook.
- Use backpropagation to compute the gradient of the MLP via the chain rule
- To do this, need the partial derivative of with respect to each weight and bias (in each layer of the network).
- Use these partial derivatives to do the update for gradient descent.
CNNs
- Have far fewer parameters than a dense layer, by enforcing structure:
- Sparse Interactions: The kernel only interacts with a limited local region of inputs
- Parameter Sharing: The same kernel (learned) is applied to all inputs - less parameters than having a weight for every input.
- Can further reduce the computation is by using stride
- Move the kernel along by more than 1 unit at a time
- Pooling A layer that has no trainable parameters, but can be used as a component to reduce the size of the model.
- Done by computing the average (or maximum) values over a given filter size (e.g. ).
Drop-out
- Randomly set some hidden units to 0 each training iteration so that they don’t do anything
- A technique that can reduce model complexity.
Lecture 8
Bagging
- Bootstrapping Create multiple subsets of the data, sampling with replacement from training set.
- Train a model on each subset of the dataset
- For each prediction, the base models’ predictions are combined together to form an ensemble.
- For regression or class probabilities, the output is the average of the base models’ predictions
- As the size of the ensemble increases, the variance decreases although the mean remains the same
- Random Forest Bagged decision trees, where only a random subset of the nodes are consideed to split on
- This is in an attempt to make the models less correlated
- This might increase the variance of each base model, but overall, the random forest should have less variance
Boosting
- A more active approach to ensemble learning
- AdaBoost Iteratively train classifiers, assigning higher weights to points misclassified.
- The th model uses the weightings provided by the mistakes of the th model.
- Want to choose a model that is fast to train
- Can over-fit if is too large - can use a regularisation technique like early stopping to prevent this.
- Gradient Boosting Use a different loss function that is less sensitive to outliers.
- Start with a single weak model, and use gradient desent to find the parameters for the next model.
Lecture 9
Kernels
- Define a kernel function between two datapoints
- Given a set of non-linear basis functions (input transformations), then a very useful kernel function is the inner product between the pairs of datapoints.
- Can use this kernel function to define our model as follows:
Kernel Ride Regression
- Uses the kernel function across the entire training set and a test point denoted
- Use loss functions that are positive definite kernels such as the Gaussian kernel.
- An advantage of this is that the number of the parameters in the model is relaed to the number of training samples rather than the number of input features .
Support Vector Regression
- Change the loss function used in Kernel Ridge Regression to -insensitive loss function
- This loss function is 0 if the error is less than and linearly increasing otherwise.
Kernel Functions
- Can create our own kernel function to describe the similarity between two datapoints.
- In practice, don’t need to worry that the kernels are positive semidefinite (except for kernel ridge regression.)
- Examples of kernels include the linear kernel (Equation 8.23) and the polynomial kernel (Equation 8.24) in which the order of the polynomial is
Support Vector Classification
- If using the hinge loss function then we end up with a training problem that is convex-constrained optimisation problem
- Requires numerical solver
- when this is solved, the solution tends to be sparse, with many
Lecture 10
Bayesian Approach
- A statistical approach for finding optimal parameter set for the model.
- Define prior distribution over the parameters before seeing data
- Observe some data and update the prior to a posterior distribution
- To make predictions about a new datapoint multiply the likelihood with the posterior distribution and integrate (evaluate) over all parameters
Bayesian Linear Regression
- Can get away with multivariate gaussian distribution
- There’s a closed-form solution
- Get a predictive distribution that captures the uncertainty given the prior and model
- Sampling more datapoints from the training set causes the predictive distribution to converge to the true solution
- Uncertainty around the observed points reduces.
- For linear regression, can use linear and quadratic kernels.